Published 4/2024
Created by Ivan Kholodilin
MP4 | Video: h264, 1280×720 | Audio: AAC, 44.1 KHz, 2 Ch
Genre: eLearning | Language: English | Duration: 13 Lectures ( 2h 2m ) | Size: 1.5 GB
parol6, robotics, unity, matlab
What you’ll learn:
Import robot arm to unity
Setup robot origins in Unity
Kinematics diagram of the robot
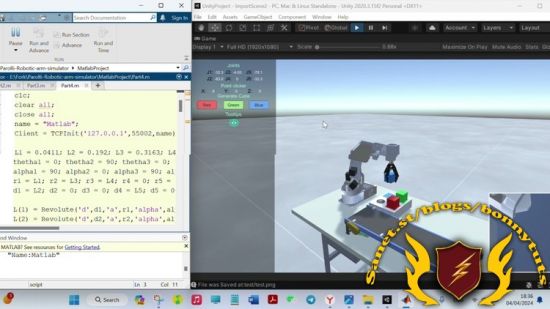
Robot control with Matlab
Requirements:
Preliminary work in Unity and Matlab is needed
Description:
This course explains the process of creating the virtual robotic arm in Unity and its control with Matlab for the robotic arm was considered as the open source project and named Parol6.Series of following Tutorials include:· Part 1Creating the Unity project. Importing the robot, step by step explanations from 3D model in Solidworks to the final model in Unity. Configuring origins of the robot’s joints were explained with Blender.· Part 2The kinematics diagram of the robot arm is explained. For kinematics diagram the Denavit–Hartenbergconvention was used (Shortly DH-Table). Next kinematics were tested with the Robotics toolbox for Matlab. In this part it is also explained how to grab object by the gripper. How to operate with the robot by the script. How to operate with the robot by the Matlab.· Part 3How to grab objects and sort them by color (Image transfer from Unity to Matlab). Matlab code explanation as well as C# code explanation, how these two programs are communicating with each other· Part 4Adding conveyor to Unity and sort objects by color. How to operate with conveyor: move object along it, program sensors to change speed and stop the conveyor. Communication part with Matlab.
Password/解压密码www.tbtos.com
转载请注明:0daytown » Parol6 Robotic Arm Unity Simulator with Matlab Control